从 2019 年开始,特斯拉首席执行官伊隆·马斯克(Elon Musk)将不断预热名为“Dojo”的神经网络训练计算机。马斯克表示,Dojo 能够处理大量的视频数据,从而实现完全依靠视觉的自动驾驶。目前 Dojo 目前仍处于开发状态,但特斯拉今天披露了一台全新的超级计算机,会作为 Dojo 的开发原型版本。
在本周一召开的 2021 年度计算机视觉和模式识别会议上,特斯拉的人工智能主管 Andrej Karpathy 透露了该公司的最新超级计算机。该计算机允许汽车制造商放弃雷达和激光雷达等辅助设备,完全依赖高质量的光学摄像机实现自动驾驶。
在自动驾驶研讨会上,Andrej Karpathy 解释说想要让计算机以人类的方式对新环境做出反应,这就需要一个巨大的数据集,以及一台大规模的强大的超级计算机,并利用这些数据集训练该公司基于神经网络的自动驾驶技术。围绕着这个目标,团队启动了 Dojo 项目。
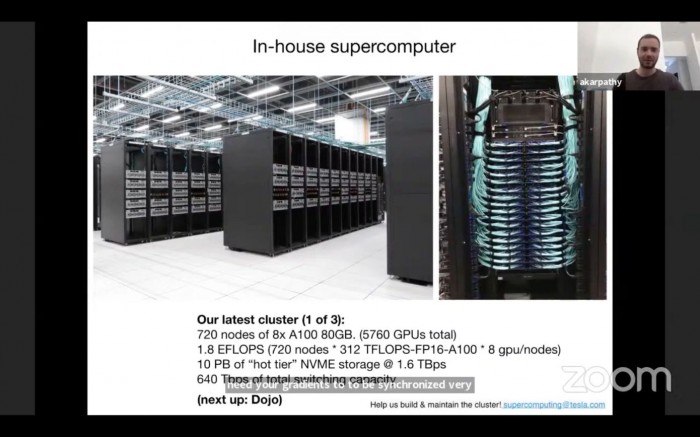
Karpathy 表示,特斯拉的最新一代超级计算机具备 10PB 的“hot tier” NVME 存储,并能以每秒 1.6TB 的速度运行。他表示凭借着 1.8 EFLOPS 就能跻身成为全球第五大超级计算机。不过他也表示团队还没有运行进入 TOP500 超级计算机排名所需的具体基准测试。
Karpathy 表示:“虽然没有经过基准测试,但如果按照 FLOPS 来排名的话,它确实可以排在第五位左右。第五位目前由英伟达公司的 Selene 集群占据,该集群拥有非常相似的架构和类似的 GPU 数量(4480 对我们的 5760,所以少一点)”。
马斯克主张采用纯视觉的自动驾驶方法已有一段时间了,这在很大程度上是因为摄像头比雷达或激光雷达更快。截至 5 月,北美的特斯拉Y型和3型汽车在制造时没有使用雷达,而是依靠摄像头和机器学习来支持其高级驾驶辅助系统和自动驾驶。
Karpathy 表示:“我们采取的方法是基于视觉的,主要使用神经网络,理论上可以在地球上任何地方发挥作用”。
Karpathy分享了特斯拉的超级计算机如何运用计算机视觉来纠正司机的不良行为的一些场景,包括紧急制动场景,其中计算机的物体检测启动,使行人免于被撞,以及交通控制警告,可以识别远处的黄灯并向尚未开始减速的司机发出警报。
特斯拉汽车也已经证明了一种叫做踏板误操作缓解的功能,在这种情况下,汽车会识别出路径上的行人,甚至是缺乏驾驶路径,并对司机不小心踩下油门而不是刹车做出反应,有可能拯救车辆前方的行人,或者防止司机加速冲入河中。
特斯拉的超级计算机以每秒36帧的速度收集来自车辆周围的八个摄像头的视频,这提供了关于汽车周围环境的大量信息,Karpathy解释说。